摘要:提出了一种改进的基于阴影的成像方法,结合光线追踪算法,用于气泡介观结构的三维(3D)重建。气泡作为透明物体,其3D微尺度界面的测量具有挑战性,是多相流研究领域的前沿课题。本研究基于亥姆霍兹互易性、高斯光学和斯涅尔定律,利用单台高速相机和小角度漫反射背光源,开发了一种重建算法。通过对比使用Blender生成的3D模型渲染图像的重建结果来评估该算法的准确性。标准模型包括透明空心球模型和具有复杂形状的空心球。通过分析和比较气泡模型边缘的轮廓线来确定算法的精度。该方法提供了前所未有的精确度和效率。在超声波增强的湍流流场中进行了气泡剧烈变形的实验,以评估3D重建算法。在超声波作用下气泡分裂成微米/纳米气泡之前,气泡表面在小尺度湍流涡流的持续撞击下发生剧烈变形。所提出的算法表现出高实时效率和精度。
背景
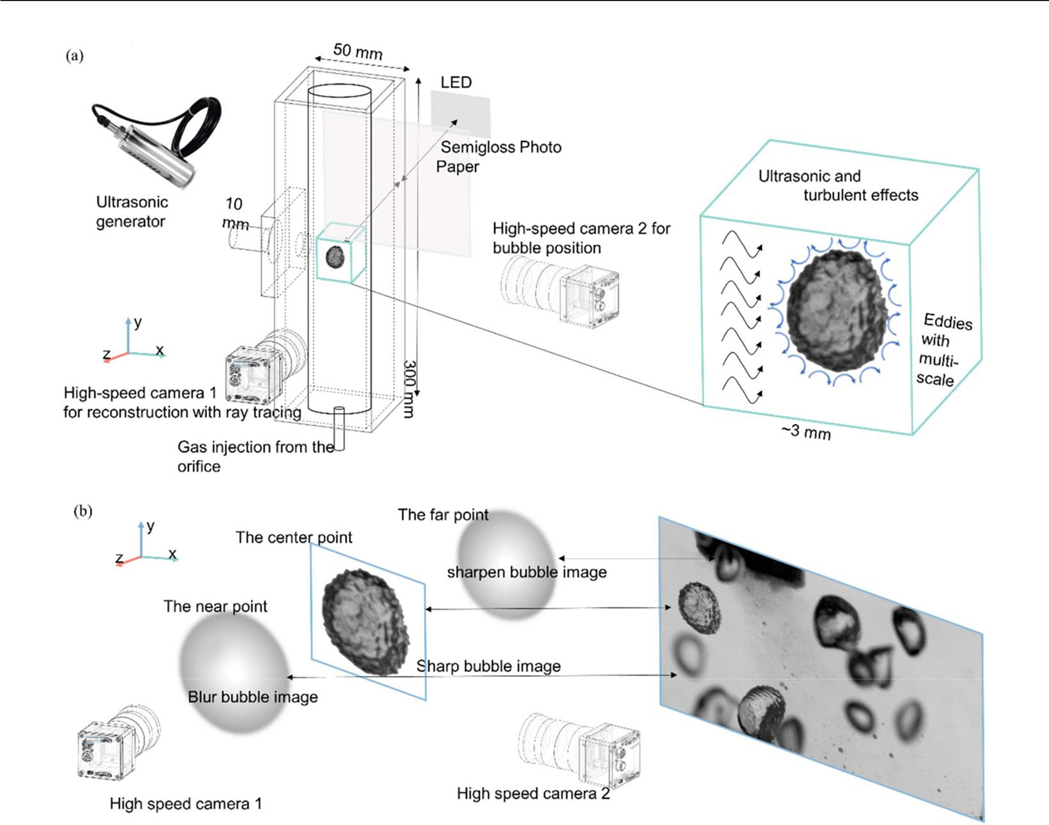
工业反应过程中,气泡的大小、位置和动力学参数对其传质传热有重要影响。其中工业中气泡的生成方法多种多样,例如,超声波碎化生成,和湍流碎化等方法。而气泡在逆压梯度流中发生剧烈变形和振荡过程中的多元破碎会产生更加微小尺度的气泡,其中气泡与多尺度湍流涡作用机理尚不明确。对该区域的多尺度湍流涡作用下的气泡振荡变形以及破碎作用机制的实验研究属于微观界面测量的问题。
算法
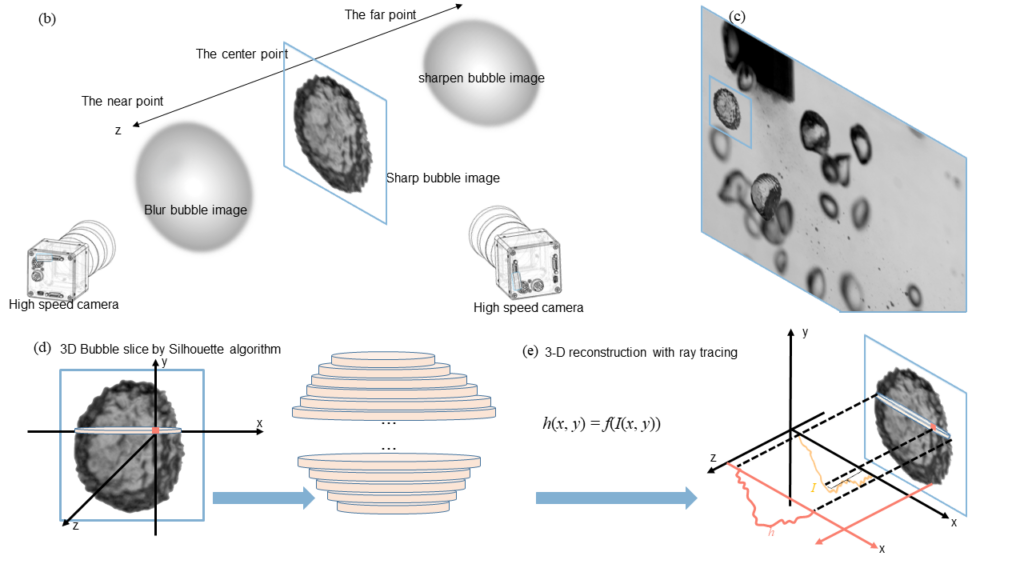
3D-RTRT的预处理步骤中,获得了气泡灰度图像和无气泡的背景图像。这些12位图像的灰度值范围为0到4095。在对每个气泡进行分割后,依次进行亮度调整、背景扣除、二值化、去噪和填充孔洞(Song等,2022)。随后进行3D-RTRT的主要处理,包括气泡位置检测和图像分割处理。重建过程如图3所示。气泡图像通常包括位于世界坐标系原点的最清晰气泡,以及位于近点或远点的模糊气泡。接着,分割步骤区分了近点和远点气泡。对中心(最清晰)气泡进行了光学分析。为确定气泡边界的模糊度,采用Brenner函数识别清晰聚焦的气泡(Bian等,2013;Sha等,2019)。然后,将分割区域内的各气泡的灰度、梯度和空间深度信息进行关联,以获得气泡的3D表面。
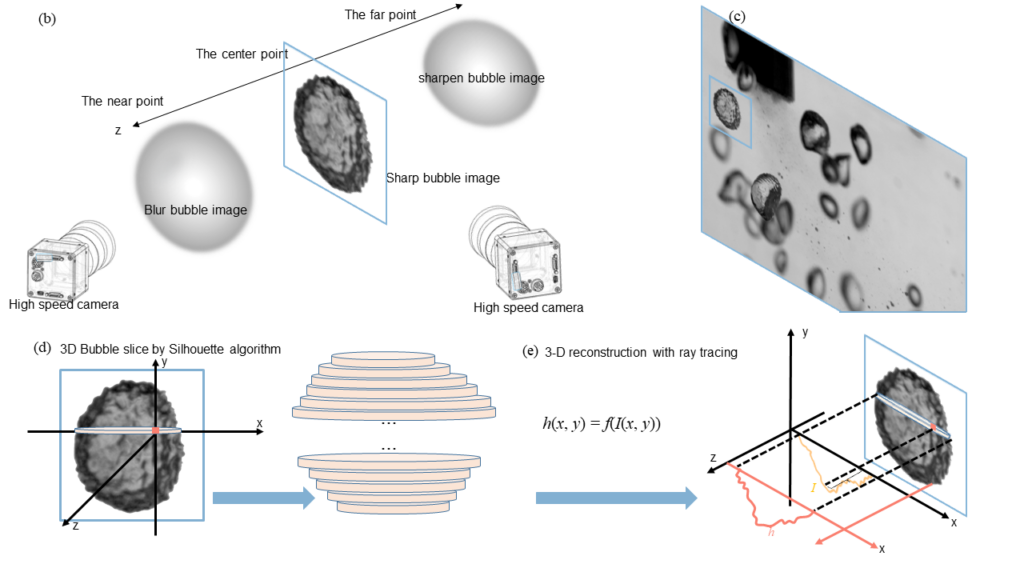
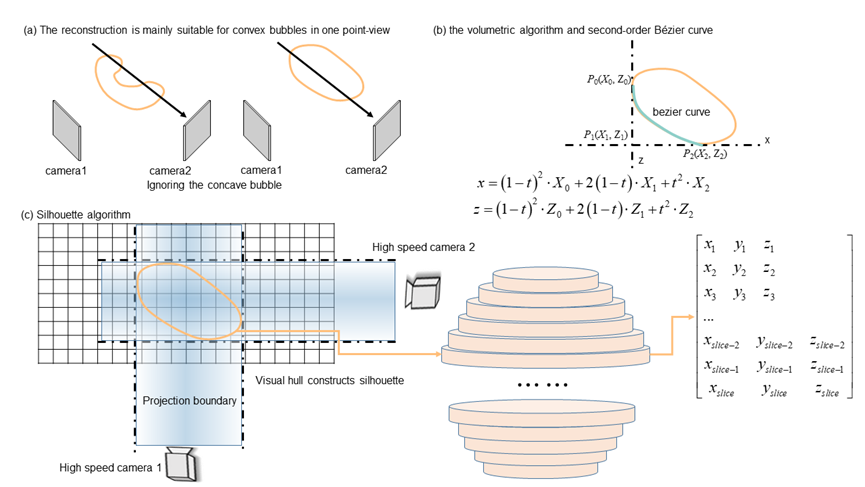
通过分析气泡光路跟踪并优化当前图像重建算法,开发了一种能够获取气泡表面微结构的3D形态测量算法。该方法采用轮廓算法获取每个切片的气泡三维结构(Fu等,2018),如图所示。
在不同漫射角度背光源下的气泡灰度图像显示了气泡表面三维形态引起的光折射现象。图像揭示了气泡表面的3D介观信息。因此,使用灰度值构建了不同气泡形状的3D参数,基于光路信息。不同倾斜角度的背光源生成了具有不均匀灰度分布的变形气泡图像。灰度较低的区域表示更高的背光透射(Gong等,2022),且灰度值与气泡表面的3D形态相关,即气泡表面的形态可以用图像中的灰度表示为函数:
为二维气泡图像的像素坐标,如图3所示。此外,3D-RTRT作为一种复杂的反向路径追踪方法计算量很大。此外,基于光渲染的基本原理,该算法提出了简化方案以提高计算效率(Lyu等,2020)。
光线在单次曝光时间内被CMOS捕获(Sun,2023)。气泡图像中所有像素的最大灰度值为4095。在实验设置中,漫射背光源的强度为10,000 nm。CMOS的位置由灰度值0表征,表示未捕获光线。相机仅捕获通过气泡和从小角度漫射背光源发出的光线。实验中使用了±10°的实心角漫射背光源,如附录图11所示。柔光角约为10°。实验环境覆盖有吸光黑漆,以最大限度减少环境反射的影响。在成像过程中,对于每个光源点,在10°的实心角内发射多个光线,并向前传播直至进入相机。相机视场内光源的像素区域为1280像素×800像素。每个LED点光源假定占据64×64像素的区域。该区域取决于LED光学透镜与漫射柔光纸的组合。来自每个光锥的光线用于渲染气泡图像。
气泡表面遵循局部连续性的假设,即当光线通过气-液界面时,会发生折射和反射,但不会发生散射。在界面处,每条光线仅在气泡界面处发生一次折射。理论上,光线偏离成像区域。同时,CMOS的尺寸小于LED,因此所有入射光线都会通过LED进行反向光线追踪。因此,在多气泡情况下通常不考虑气泡表面的反射光。在实验设置中,在气泡水箱、相机和LED之间设置了补偿水箱,以确保光的均匀分布。
软件使用说明:
该程序对单幅图像进行光线追踪,获得气泡的三维形态中的细节信息。
https://github.com/huntersong/bubbleprocessing/
#ray tracing 程序分三个个部分
第一个部分是标定过程,获得相机和测量域在世界坐标系下的相对位置以及可以获得气泡之间的相对空间信息,这里需要最基本的双目标定,本程序不涉及,直接采用正交布置的相机标定外参和内参;
第二部分是预处理图像,对两个个相机的图像进行处理,获得光线追踪算法的输入初值,这里主要获得单个气泡的二维图像;
第三部分是基于光线追踪的三维重建
使用方法:运行raytrace_main.m程序
通过对当前文件夹里编辑image_camera1 = imread(“figure1.bmp”);选择本文件夹下的图片,或者其他图像,最理想的图像是单个气泡,气泡的背景颜色为白色,仅仅气泡区域存在灰度差异,便于直接进行光线追踪。
This passage describes a process involving three main parts:
Calibration Process: Obtaining the relative positions of the cameras and the measurement domain in the world coordinate system, as well as acquiring the relative spatial information between bubbles. This requires basic stereo calibration. The program uses the external and internal parameters of cameras arranged orthogonally without involving stereo calibration directly.
Image Preprocessing: Processing the images from two cameras to obtain the initial values for the ray tracing algorithm. This step primarily involves obtaining the two-dimensional image of a single bubble.
Three-Dimensional Reconstruction Based on Ray Tracing: This is the main part of the process, where three-dimensional reconstruction is performed using ray tracing.
Usage: Run the “raytrace_main.m” program. Choose the image by editing the line “image_camera1 = imread(“figure1.bmp”);” in the current folder. The preferred image is one with a single bubble, where the background is white, and only the bubble region exhibits grayscale differences, facilitating direct ray tracing. more url
总结:
1、提出的光线追踪算法: 引入了一种创新的光线追踪算法,结合改进的基于阴影的成像方法,用于透明气泡的精确 3D 重建。该技术提高了捕获气泡形态的复杂中观结构的可视化准确性。
2、微观界面测量:通过高速时间分辨和空间分辨可视化实验,该研究深入研究了气泡在多尺度湍流涡流中的振荡变形和破裂机制。这项研究解决了微观界面测量中的挑战。
3、高效的变形跟踪:通过亥姆霍兹互易性、高斯光学和斯涅尔定律,来自背光源的漫射光线与气泡表面上的入射光线相关联。这种方法可以确定气泡等值线。借助光线追踪方法,仅使用一台高速摄像机即可有效地跟踪详细的变形,即使在超声波效应引起的湍流中也是如此,从而可能减少对多台摄像机的需求。